Abort, Retry, Fail?_
Errata
This page lists known errors and misspellings from the publications.
Transactions on Robotics: Kinematic Motion Model for Jumping Scout Robots
Some problems occurred during the final production of the paper, due to the final conversion in XML.
- The markup of the quantities dbody, rbody, cspring, rspring, tpeak, and zpeak is consistently wrong in the text (but correct in the figures).
- The correct sentence in the footnote is: "This paper was presented in part at the IEEE International Conference on Robotics and Automation, Taipei, Taiwan, R.O.C., September 2003."
- p. 399, column 2, first equation: The vector should be vertically centered with the last line.
- p. 399, column 2, just after equation 3: The correct expression is: tan γ = (tz - rspring + rbody)/ty.
- p. 401, equations (6) and (7): The commas and the period in-between the value and the case description should be removed.
- The correct reference [5] is: MTS Systems Corp., Eden Prairie, MN, DARPA Scout Assy, Jun. 2000.
Dissertation: Vision-based Control of Miniature Jumping Scout Robots
- p. 9, Section 2.2, paragraph 2, sentence 2: The fragment "that the the wheels" should have one fewer "the".
- p. 12, Section 2.3, last sentence: Space missing between "Sapiro" and "et al.".
- p. 25, Section 3.1.5, paragraph 2, sentence 4: Replace "a reduced" with "an increased".
- p. 32, Equation (3.13): z should be xz.
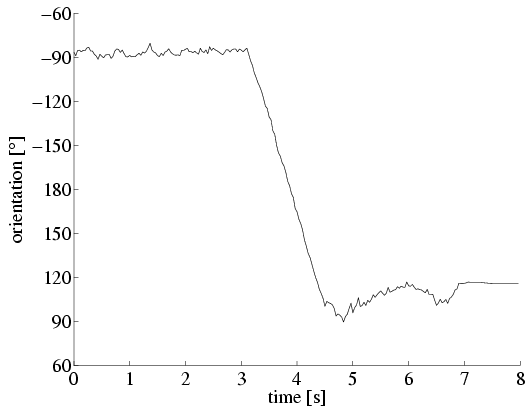
- p. 62, sentences 2 and 3: Replace with "It moves forward with medium speed, turns right, and moves forward with high speed. The turn starts 3 s into the run and lasts for about 1.5 s as Figure 47(c) illustrates."
- p. 63, Figure 47(c): The
data were incorrectly transformed. This is the corrected figure:
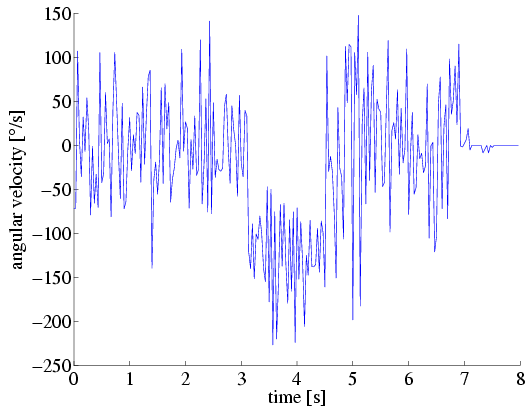
You can also download a PDF version. - p. 64, Figure 48(c): The
data were incorrectly transformed. This is the corrected figure:
You can also download a PDF version. - p. 75: The 5th point of the numbered list should end with a comma instead of a period.
AMS 2000: Verteilte Steuerung heterogener mobiler Roboter
- Abschnitt 2.1: Statt "Intrakomponentenkommunikation" muss es "Interkomponentenkommunikation" heissen.
- Abbildung 2(b): Der Pfeil von "starte" muss in die Gegenrichtung zeigen.
- Abbildung 3: Dem Selbstaufruf am RCM fehlt der Kopf.