Procrastination is like masturbation: It's great at first, but then you realize that you are only fucking yourself.― unknown (first seen in a post on Slashdot)
Projects
Backup of Native Google Drive Documents
Google Takeout does not allow to backup built-in file formats (e.g., Docs, Sheets) by itself. You always have to get everything, including uploaded documents. The Google Drive client does not help either, because it merely stores links for the native file formats. Here's a bash script that allows exporting all native documents (and those only!) to local storage along with the meta-information needed to restore the files to Google Drive if it ever fails: gdrivebackup.sh.
World's Smallest Autonomous Robotic Stair-Surmounting System
Scouts are cylindrical robots just 10 cm
in length with only rudimentary computational resources. The lack of
intelligence necessitated the use of either teleoperation, which fatigues the
human operator quickly, or undesirable open-loop control. By tracking a Scout
with an external camera using topologically adapting snakes and relaying control
commands to the robot, I was able to create the world's smallest autonomous
robotic stair-surmounting system. The Scout situates itself at an advantageous
position and subsequently jumps onto the next step, as demonstrated in a short
video. The steps only
appear big in comparison to the robot; they were constructed according to
building codes.

The robot was also most notably featured on Slashdot, The
Daily Show with Jon Stewart, CNN Headline News, and the BBC in a show titled
"Seven Ways to Topple Saddam".

Topologically Adapting Snakes
 I have improved the tracking performance of active contour models by allowing snakes to split and merge. This can be useful for handling occlusions (e.g., pedestrian tracking) and objects that undergo topological changes. Enjoy the relaxing video of tracking the globule in a liquid motion lamp.
I have improved the tracking performance of active contour models by allowing snakes to split and merge. This can be useful for handling occlusions (e.g., pedestrian tracking) and objects that undergo topological changes. Enjoy the relaxing video of tracking the globule in a liquid motion lamp.
Regrasping
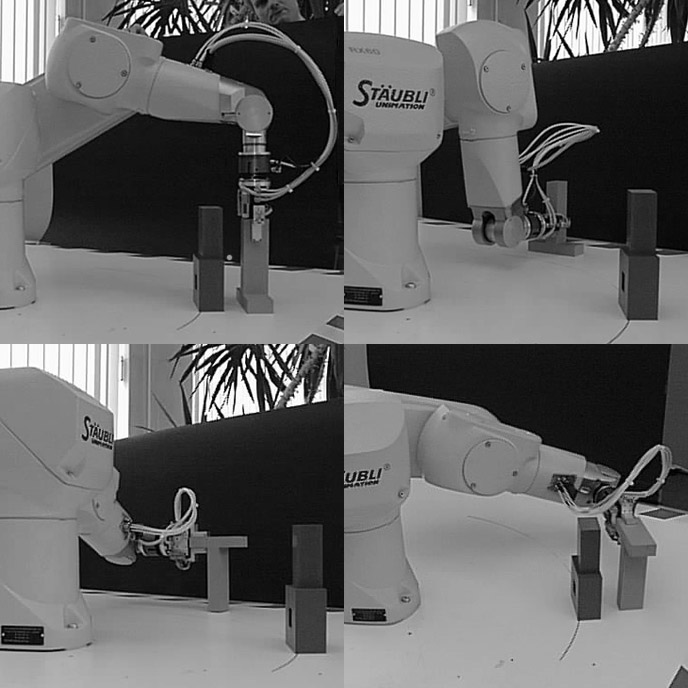 Manipulators in contemporary workcells are optimized for fast throughput by employing part feeding mechanisms and assuming single-grasp operations. This approach is ill-suited for unstructured environments, in which no guarantee for the initial placement of parts
can be made. Several grasps may be required to achieve the goal
pose. In this project, my partner and I developed a framework for
automatically generating a sequence of grasps to transfer a part with
known geometric properties from its initial pose to the desired
pose. Regrasping provides manipulators with increased flexibility to
handle unforeseen situations.
Manipulators in contemporary workcells are optimized for fast throughput by employing part feeding mechanisms and assuming single-grasp operations. This approach is ill-suited for unstructured environments, in which no guarantee for the initial placement of parts
can be made. Several grasps may be required to achieve the goal
pose. In this project, my partner and I developed a framework for
automatically generating a sequence of grasps to transfer a part with
known geometric properties from its initial pose to the desired
pose. Regrasping provides manipulators with increased flexibility to
handle unforeseen situations.
University of Minnesota LaTeX Thesis Package
Because the University of Minnesota's Graduate School did not provide a
template for dissertations, I created a simple LaTeX package. I tried to follow
the at times self-contradictory and confusing formatting guidelines as closely
as possible. Several options (e.g., spacing) can be selected in the main file
umnthesis.tex. Templates exist for mandatory pages (title,
copyright, etc.) that are output in the correct
order. To start writing your thesis, download the file umnthesis.tar. Feel free to use and
distribute it.